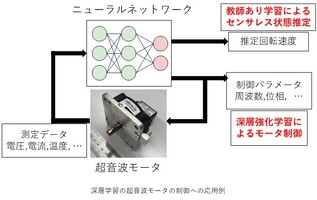
Deep reinforcement learning for ultrasonic motor control system
Ultrasonic motors are based on a particular principle of ultrasonic vibration. They have various unique advantages, such as small size, large driving force, quick response, and precise operation. On the other hand, they are difficult to control and are affected by rising temperatures. We have, therefore, incorporated deep learning into the control to achieve flexible control that can respond appropriately to temperature changes. Furthermore, by using information such as the current that drives the motor to estimate mechanical states such as rotation speed without the need for sensors, we can eliminate large sensors from the system and further take advantage of the compactness of ultrasonic motors. This research could lead to applications in, for example, hand-tip drives for robotic arms where space is limited and force-haptic devices where force sensing and control are required.
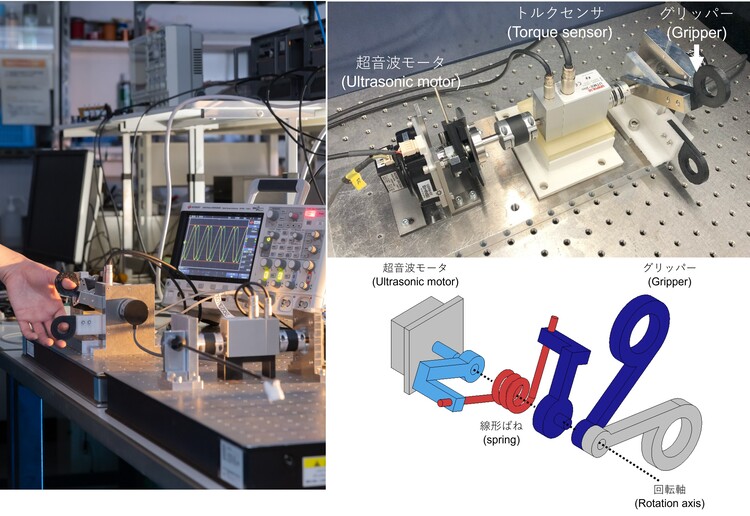
Remote surgery assistance robot operated by ultrasonic motor
We are conducting research on force feedback systems for teleoperated surgical robots by utilizing the advantages of ultrasonic motors, such as quick response and precise motion. In the medical field, the demand of remote surgery using surgical robots is increased. During the surgery, surgical robots are required to have a force feedback that transmits a sense of force to a doctor's hand when a surgical instrument contacts an affected part. By using ultrasonic motors to reproduce the sense of force, it is expected to represent realistic force with less error and delay. In addition, since ultrasonic motors are not affected by electromagnetic environment, they can be used in conjunction with MRI examinations. Using ultrasonic motors, we have developed a system to present the gripping force of forceps (a tool used to grasp organs). The system has succeeded in presenting the feel of soft objects such as sponges to the operator with high precision.
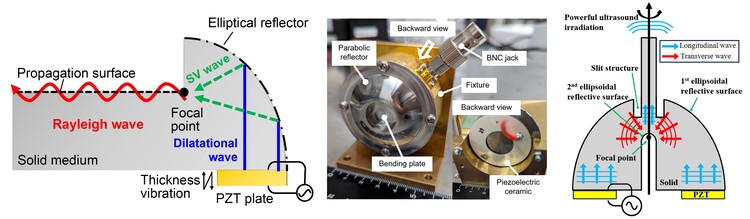
Development of high-power ultrasonic devices
Powerful ultrasound has been utilized in various fields, such as medicine, processing, and cleaning.To expand the range of applications of powerful ultrasound, we research transducers that can generate powerful ultrasounds in a higher frequency band than conventional transducers. The driving principle is based on a focusing structure using parabolic or elliptic surfaces.The Langevin transducer, which is a conventionally used powerful ultrasonic transducer, can generate powerful ultrasound only at a single resonance frequency in the range of 20~100kHz. On the other hand, our transducers are capable of excitation of powerful ultrasound at multiple frequencies in the range of 20 kHz to several MHz.In addition, there are various types of ultrasonic waves such as longitudinal waves, transverse waves, plate waves, and surface acoustic waves. We determine the waves to be excited according to the target problems and design and propose transducers of suitable structures for them.This research is expected to improve the efficiency of existing applications of powerful ultrasound and to elucidate new phenomena caused by ultrasonic waves by excitation of powerful ultrasound in the MHz band, which has not been realized so far.
Elucidation of the biochemical response of cells to ultrasonic irradiation
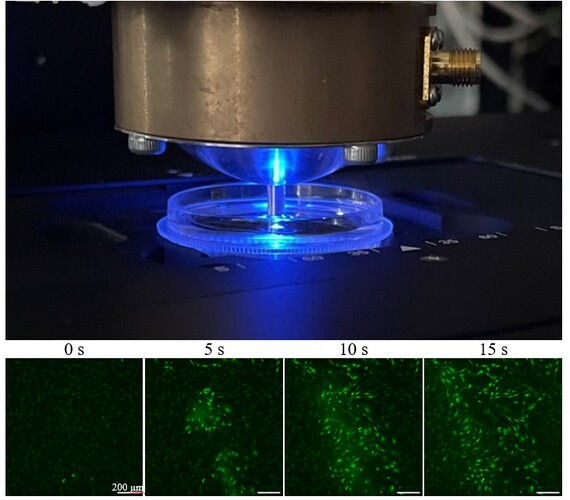
It has been reported that ultrasound irradiation of cells can control various biological phenomena such as cell differentiation, proliferation, adhesion, and motility. However, it is difficult to control the ultrasound irradiation conditions (sound pressure and frequency) applied to cells, and the optimal ultrasound conditions for cell control have not been uncovered. We develop an ultrasound irradiation system that systematically varies sound pressure and frequency to irradiate cultured cells. We, then, investigate the conditions under which cells respond to ultrasound. The figure below shows the results of an experiment in which changes in fluorescence intensity were observed in response to the concentration of intracellular calcium ions, an important substance involved in the control of biological phenomena. By measuring the biochemical response of cells, we aim to elucidate the frequency characteristics of cells. This research is expected to contribute to the establishment of safe and efficient therapeutic techniques using ultrasound.