研究紹介
深層強化学習による超音波モータ制御システム
超音波モータは超音波振動による特殊な原理に基づくモータです.小型,大きな駆動力,素早い応答,精密な動作など,さまざまな独自の利点があります.その一方で,制御が難しかったり,温度上昇に影響されてしまったりといった課題がありました.そこで,我々は深層学習を制御に取り入れることで,温度変化に対しても適切に対応できる柔軟な制御を実現しています.さらには,モータを駆動する電流などの情報を用いて,回転数など機械的状態をセンサレスに推定することで,システムから大型のセンサを省き,超音波モータの小型性をさらに活かすことも可能にしています.この研究によって、例えば空間の限られたロボットアームの手先の駆動装置や,力のセンシングと制御が求められる力触覚デバイスへの応用が期待できます.
超音波モータによる遠隔操作手術支援ロボット
超音波モータの応答の早さや精密動作といった利点を活かし、遠隔操作型手術支援ロボットにおける力覚提示システムの研究を行っています。医療分野では手術支援ロボットを用いた遠隔手術の普及が進んでおり、手術中処置具が患部に接触したときの力覚を医者の手に伝える、力覚提示機能が手術支援ロボットに求められています。力覚を再現するために超音波モータを使用することで、誤差や遅延の少ないリアルな力覚提示の実現が期待されます。また、超音波モータは磁気の影響を受けないため、MRI 検査と併用することも可能です。我々は超音波モータを用いて、鉗子(臓器などを掴むための処置具)の掴む力を提示するシステムを開発し、スポンジなどの柔らかい物体の感触を高精度で操作者に提示することに成功しました。
強力超音波デバイス
強力超音波は医療, 加工, 洗浄など様々な領域で活用されています.私達は強力超音波の適用範囲を広げるために, 従来より高い周波数帯域において強力超音波を生成する振動子を研究・開発しています. 駆動原理には放物面, 楕円面などを利用した集束構造を用いています.従来使われてきた強力超音波振動子であるランジュバン振動子は20~100kHzの範囲で, 基本的に一つの共振周波数でしか強力超音波を生成できませんでした. 一方, 我々の振動子は20kHz~数MHzの範囲において複数の周波数で強力超音波を励振可能です.また, 一口に超音波といっても縦波, 横波, 板波, 表面弾性波などさまざまな種類があります. 適用問題に合わせて励振する波を決定し, それに適した形状の振動子を設計・提案しています.この研究によりこれまで実現されていなかったMHz帯域の強力超音波を励振することで, 強力超音波の既存用途における効率化や, 超音波により生じる新たな現象の解明が期待されています.本研究により細棒を励振した論文はAIP Publishing Showcase(AIP Publishingの学術雑誌から厳選した論文を紹介するプラットフォーム)にFrontiers in Human Neuroscience の研究として選出されました[リンク]. 多周波強力超音波を単一の振動子で局所的に照射できる点が評価され, 医療・産業応用の発展に資するものとして紹介されています.
超音波照射による細胞の生化学応答の解明
細胞に超音波を照射することにより,細胞の分化や増殖,接着や運動性など様々な生命現象を制御できることが報告されています.しかし,細胞に付与する超音波の照射条件(音圧や周波数)の制御が困難なため,細胞の制御に最適な超音波の条件も不明でした.培養細胞に対して音圧と周波数を系統的に変化させて超音波を照射するシステムを開発し,細胞が反応する条件の検討を行っています.下図は生命現象の制御に関与する重要な物質である細胞内カルシウムイオン濃度に応じた蛍光強度の変化を観測した実験結果です.超音波照射から時間が経つごとにカルシウム濃度の変化が周囲の細胞に伝わっていく様子が捉えられています.細胞の生化学的応答をリアルタイムに計測することで,細胞の周波数特性の解明を目指します.本研究によって,超音波を用いた安全で効率的な治療技術の確立に貢献することが期待されます.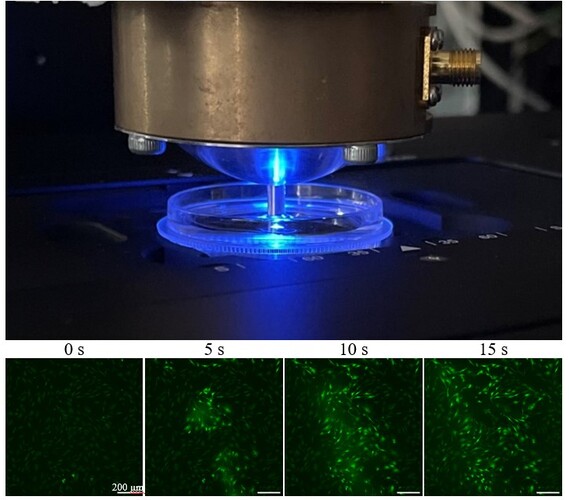
非接触手法による金属材料弾性特性の精密計測
振動デバイス設計の際には材料の振動特性を正確に把握することが必要です.しかし既存の計測手法で弾性特性の精密計測を行うことは計測サンプルの支持方法や,振動源との接触が測定結果に大きな影響を与えるため困難になります.そのため,電磁超音波トランスで(EMAT)による非接触励振と近距離超音波浮揚を用いたサンプルの非接触支持を組み合わせた手法を考案しました.また単に金属材料の振動特性を計測するのではなく縦弾性係数や横弾性係数に関する振動特性を独立に計測することで,弾性材料振動メカニズムの本質的理解につながることが期待されます.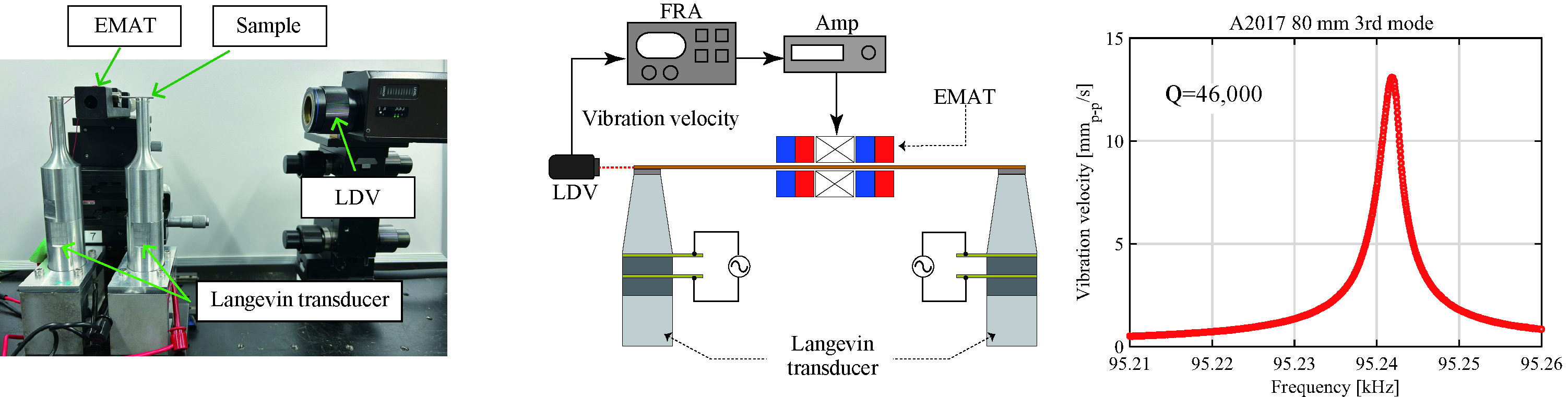
楕円反射集束超音波トランスデューサー(ELIPS)用いた音響流体デバイス
音波による粒子操作(Acoustophoresis)は、赤血球、血小板、マイクロプラスチック等の微粒子を操作できる有望な技術として知られています。しかし、一般的な遠心分離機(5~10 mL/min)に比べてスループットが低く(1 mL/min未満)、その応用範囲は限られています。従来のバルク波(BAW)を用いたAcoustophoresisデバイスでは、駆動源として圧電素子単板を用いることが一般的です。しかし、この手法は低効率、高温度上昇、低スループットといった課題があります。そこで本研究では、楕円反射面による超音波集束機構であるELliptical reflector for hIgh-Power ultraSound(ELIPS)を用いた新しい駆動方式を提案しました。ELIPSを使用することで、1.7 Wという小さな入力電力で、直径5 µmのポリスチレン粒子を5 mL/minの高流量条件下で効率よく集束させることに成功しました。また、デバイス全体の温度上昇は小さく、熱的な細胞適合性を示しました。これらの結果から、ELIPSは超音波集束構造として機能し、Acoustophoresisデバイスの性能を大幅に向上させる有力な技術となることが明らかになりました。